The members forming the mechanisms and machines are connected together through Kinematic Joints. The properties of joints such as relative motion and degrees of freedom determine the working of a machine. This article includes examples of different types of Kinematic Joints.
Joints are most important part of a mechanism. The resultant motion on operating a mechanism is determined by the kinematic joints connecting the members of the mechanism. The kinematic joints allow motion in some directions and constrain it in others. The types of motions allowed and constrained are related to the degrees of freedom of a joint. Read more about Degrees of Freedom (dof) .
Classification
Basically the Kinematic Joints are classified into two categories based on the type of contact between the two members making a joint. It can be point, line or area contact.
-
Lower pair joint.
-
Higher pair joint.
But a third category of kinematic joint can also be created which is comprised of the joints formed by combination of two or more lower and/or higher pair joints. Such joints are termed as Compound Joints.
3. Compound Joints.
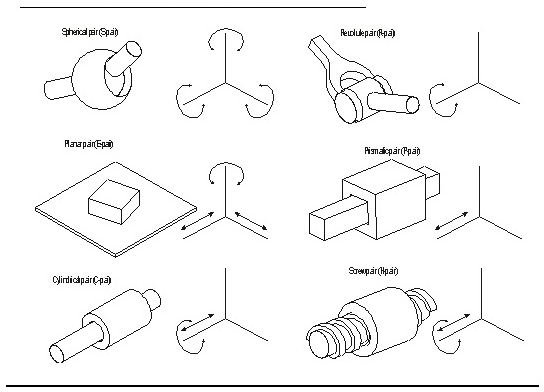
Lower Pair Joints
The two members forming a lower pair joint have area contact between the two mating surfaces. The contact stress is thus small for lower pair joint as compared to higher pair joints. Lower pair joints have long service life as the wear and stress is spread over larger surface area of contact and also allows for better lubrication. The degrees of freedom for a lower pair of joint is usually less as the requirement for area contact between the members constrains the geometry of the joint.
Examples of Lower Pair Joints
1. Revolute/Hinge Joint, 1 DoF
2. Prismatic/Slider Joint, 1 DoF
3. Srew/Helical Joint, 1 DoF
4. Cylindrical Joint, 2 DoF
5. Spherical/Ball Joint, 3 DoF
6. Planar Joint, 3 DoF
Higher Pair Joints
The contact between the two members of higher pair has point or line geometry. The contact stress for a higher pair joint is large because of very small contact area. If there is pure rolling contact between the members then at any point of time the contact point or line is at rest. There is no relative sliding between the contact surfaces and thus friction and wear will be negligible. The degrees of freedom for a higher pair of joint can be high as the point or line contact allows for less constrained motion of members.
Examples of Higher Pair Joints
1. Cylindrical roller, 1 DoF

2. Cam pair 2 DoF
Compound Joints
Lower pair and/or higher pair joints are combined as per the design requirement to obtain compound joints. Compound joints composed of higher pair joints can be kinematically equivalent to lower pair joints or vice verse. By such combinations desirable features from the combining joints are retained to obtain robust joints.
Examples of Compound Joints
Ball or Roller Bearings: The actual members in contact are balls or rollers with the inner and outer race. These are rolling contact which is a higher pair. But the overall joint has the motion geometry of revolute joint, a lower pair. A ball bearing has low friction properties of rolling contacts and higher load capacity of revolute joints. Ball or Roller Bearings are kinematically equivalent to simple revolute joint.

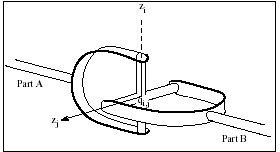
Universal of Hooke Joint: It is a combination of revolute joints and has two degrees of freedom.
This post is part of the series: Kinematics - Design of Mechanisms
Machines as simple as livers, machines such as James Watt’s steam engine and the industrial robots such as PUMA all are composed of mechanisms whether simple, complex or combination of many simple and complex mechanisms. These mechanisms are governed by Kinematics – the study of geometry and motion.
- Kinematics - Design of Mechanisms: Introduction
- Analysis and Synthesis in Machine Design
- Types of Kinematic Joints
- Degrees of Freedom
- Kinematics – Design of Mechanisms: Kinematic Inversion
- Kinematics – Actuation of Machines: Part I – Electrical Actuation
- Kinematics – Actuation of Machines: Part II – Hydraulic Actuation
- Kinematics – Actuation of Machines: Part III – Pneumatic Actuation
- Kinematics - Analysis of Mechanisms: Methods and Techniques
- Kinematics - Synthesis of Mechanisms: Methods and Techniques
- Four Bar Linkages in Machine Design
- Straight Line Mechanisms
- Kinematics - Special Mechanisms: Straight Line Mechanisms - II
- Exact Straight Line Mechanisms


