There are some unusual mechanisms which can meet common needs of mechanical engineering problems. These tools help with a range of purposes like generating straight lines, transferring torque between non-coaxial shafts, self centering steering and mechanical punched card readers.
Some mechanisms have special motion characteristics different from those of generic mechanisms. These mechanisms are used for special purposes and few particular categories of motion. These mechanisms are unusual enough to be called as Special Mechanisms. Some common needs of mechanical engineering practice are:
- Generation of a straight line motion by linkage mechanism.
- Reproduction of a path traced by one point at another tracing point with a change in scale.
- Transfer of torque and motion between non-coaxial shafts with changing relative alignment.
- Automotive steering mechanisms and suspension mechanisms.
- Indexing: Intermittent timed motion.
Straight Line Mechanisms
Generation of straight line motion using linkage mechanisms has always been a common requirement in machine design practice. Although exact straight line cannot be generated using simple mechanisms though some simple mechanisms are designed such that they can produce approximate straight lines for short range of motion. These approximate straight line mechanisms has important applications in machine design. These mechanisms were used extensively in classical machines such as steam engines. Perfect straight lines can also be generated using linkage mechanisms but those are relatively complex mechanisms.
There are two classes of straight line mechanisms:
- Approximate Straight Line Mechanisms
- Exact Straight Line Mechanisms
The straight line mechanisms were mostly developed in industrial revolution days when many machines required straight line paths in their operations, whether it was guiding the piston of engines or for operating valves. Straight line mechanisms were developed by continuous effort in trail and error process with making intelligent variations in linkage mechanisms.
Approximate Straight Line Mechanisms
Watt’s Straight Line Mechanism
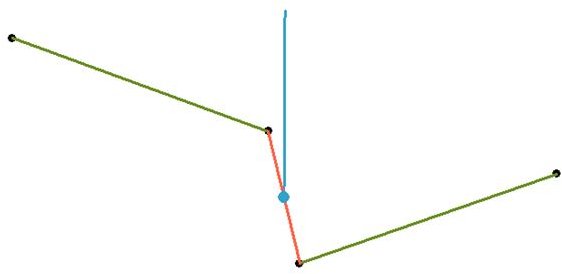
Approximate straight line mechanisms can generate straight line motion to a good deal of accuracy for short range. Such mechanisms are generally four bar linkage mechanisms. The straight line mechanism developed by James Watt, to guide the piston of steam engines through a straight line path, is considered to be as the best and simplest mechanism able to generate close to straight line motion for considerable distance. This mechanism is called as Watt’s straight line mechanism or simply Watt’s Linkage.
Watt’s linkage is a simple four bar mechanism of double-rocker type with the two rockers connected through a coupler. When the two rockers move the mid-point of the coupler moves in an almost straight line path for the motion close to coupler’s mean position. If something is hinged to the middle point of the coupler of Watt’s linkage it will be constrained to move in straight line path close to the coupler’s mean position.
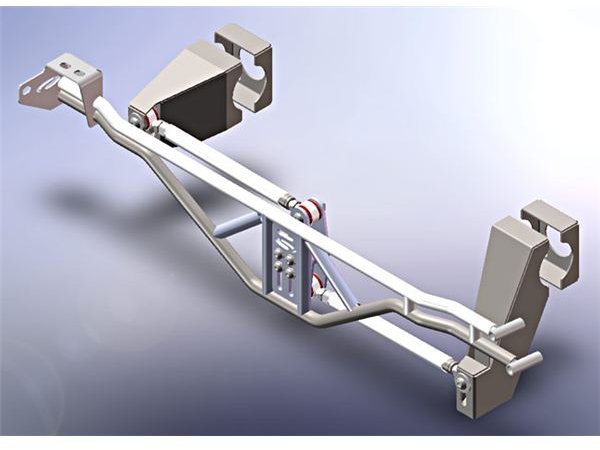
This property of Watt’s linkage is utilized in construction of rear axle suspension system of car to prevent sideways motion of car body relative to the rear axle.
This post is part of the series: Kinematics - Design of Mechanisms
Machines as simple as livers, machines such as James Watt’s steam engine and the industrial robots such as PUMA all are composed of mechanisms whether simple, complex or combination of many simple and complex mechanisms. These mechanisms are governed by Kinematics – the study of geometry and motion.
- Kinematics - Design of Mechanisms: Introduction
- Analysis and Synthesis in Machine Design
- Types of Kinematic Joints
- Degrees of Freedom
- Kinematics – Design of Mechanisms: Kinematic Inversion
- Kinematics – Actuation of Machines: Part I – Electrical Actuation
- Kinematics – Actuation of Machines: Part II – Hydraulic Actuation
- Kinematics – Actuation of Machines: Part III – Pneumatic Actuation
- Kinematics - Analysis of Mechanisms: Methods and Techniques
- Kinematics - Synthesis of Mechanisms: Methods and Techniques
- Four Bar Linkages in Machine Design
- Straight Line Mechanisms
- Kinematics - Special Mechanisms: Straight Line Mechanisms - II
- Exact Straight Line Mechanisms


