Spherical Robots are more involved in construction and more dexterous in working so is there control. The control of spherical robots requires three variables as Cartesian and Cylindrical robots do but the coordinate frame and there transformation is bit complex than other types.
Spherical Robots can perform tasks requiring movement in three dimensional spaces easily. It can reach at points in the space with ease, speed and accuracy. But to make such three dimensional robot work properly according to the specified instruction of reaching particular points and doing job there it requires a substantial amount of background work involving calculations of coordinate frames and control variables.
Work Frame of Spherical Robots
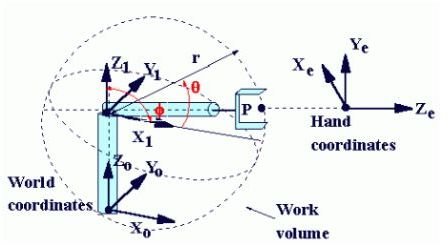
It is helpful to define coordinate frames at suitable points on the structure of a robot to analyse and effect the movements of different parts and the robot as a whole. The primary frame, common to any type of robot, is the coordinate frame fixed to the base of the robot. This frame is called as the world coordinate frame or can be called as global coordinate frame. The points in the workspace are provided in this frame. In spherical robots the second frame is attached to the joint between the vertical member and the arm. Third frame is attached to the wrist of the robot.
Control Coordinates of Spherical Robots
The target points for the end effectors are specified as per the task in world coordinate frame. But to make the end effectors move to the specific points the actuators attached to each joints have to be provided with the values of their respective movements producing the final effect as desired. This means that the control variables are the values provided to the actuators, hence, the coordinates of the target points have to be converted to the control coordinates.
The global coordinates and the control coordinates are represented in the matrix form. Control Coordinates are obtained from Global Coordinates through various transformations of the matrices. For a particular transformation of a matrix it is multiplied with a transformation matrix to obtain the required transformation. All these calculations are incorporated in a computer program and implemented through micro controllers and processors such that it takes the global coordinates and supply the actuators with the required values of the control coordinates.
Applications of Spherical Base Robots
The type of robot base to choose for a particular application is primarily decided by the reach and workspace requirement of the task. Then we search for a robot base with similar reach and workspace. After this selection criterion other details such as the accuracy and repeatability of the robot are considered. The common applications of spherical base robots are in material handling operations in the production line, such as, transferring or pick-and-place materials and stacking objects.
This post is part of the series: Base Bodies of Robots
Robots mounted on base bodies with revolute, cylindrical or spherical joints along with prismatic joints have better functionality and move with ease between the points in space. In continuation of the last series on Robots Base bodies here more involved robotic base bodies are discussed.


