
Spherical Base of the robots has just one replacement of the joint in the Cylindrical Base of the robots. The slider joint between the robot arm and the vertical member is replaced by a revolute joint. This change of a joint makes the spherical based robot more dexterous than cylindrical robot.
Spherical Base Robots
Spherical bases of the robots make them capable of working in a spherical space. Though the workspace cannot be more than a three dimensional one but with the increasing number of the revolute joints the arm movements of the robot can become more sophisticated. Spherical Bases Robots, as the name says, work in a space defined by the intersection of spherical volumes. With wide range of possibilities of complex movements robots with spherical bases find application in many industrial processes.
Construction of the Base Structure
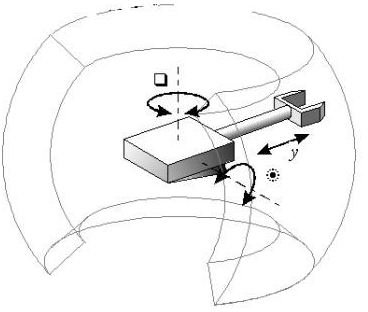
Spherical type of manipulator has the base member which can rotate about the vertical axis. A member is connected to the base member through a revolute joint and this member can extend and contract like a telescope. This arrangement of the base body makes the manipulator arm to work in a space defined as the intersection of spherical spaces.
The spherical base has the same, three, numbers of joints as the other three dimensional robot bases has. Two joints are revolute joints and the remaining is a prismatic joint such that the arm of the robot can extend and retract. The end effectors of the robot are mounted on this telescopic arm. The two revolute joint movements can be actuated by direct coupling with the servo motors and the telescopic arm movement can be actuated by a rack and pinion arrangement. Spherical base has three degrees of freedom and three variables to be controlled to operate it.
Reach and Workspace of Spherical Base Robot
Reach of a robot is the limits to which its end effectors can approach the work points. For the spherical robots the reach of its end effectors is determined by the limits of the motion of the three joints of the base. For such type of base of the robots the reach of the end effectors of the robot is a sphere. The radius of this sphere is dependent on the maximum extension of the telescopic arm.
The workspace of the spherical base robots is the volume intersection of the two concentric spheres. The dimensions of the external sphere are equal to the maximum limits of the joint movements and the radius of the inner sphere is determined by the minimum limits of the joint movements which are in turn governed by design constraints. The range of rotation of the revolute joint at base and between the base member and the arm determines the sector of the sphere that can be covered; and the range of movement of the telescope arm determines the range of the radius of the spherical volume of intersection.
This post is part of the series: Base Bodies of Robots
Robots mounted on base bodies with revolute, cylindrical or spherical joints along with prismatic joints have better functionality and move with ease between the points in space. In continuation of the last series on Robots Base bodies here more involved robotic base bodies are discussed.


