Robots mounted on base bodies with revolute, cylindrical or spherical joints along with prismatic joints have better functionality and move with ease between the points in space. In continuation of the last series on Robots Base bodies here more involved robotic base bodies are discussed.
Cylindrical Base Robot
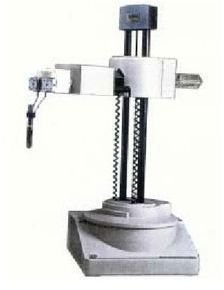
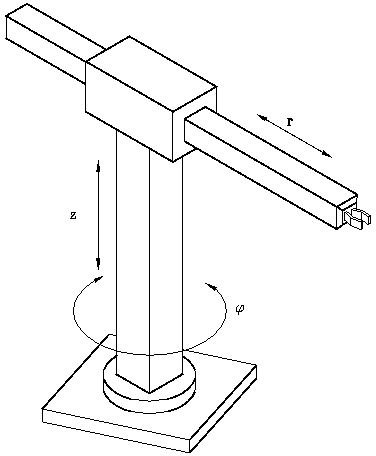
The body of this type is such that the robotic arm can move up and down along a vertical member. The arm can rotate about that vertical axis and the arm can also extend or contract. This construction makes the manipulator able to work in a cylindrical space. The dimensions of the cylindrical space are defined as, radius by the extent of the arm and height by the movement along the vertical member. The cylindrical manipulator base body has one revolute joint at the fixed frame, one cylindrical joint about the axis of rotation and one prismatic joint in the arm of the manipulator.
The position of the end is defined by the extension of the arm, height of the arm and rotation of the main body axis. These are the three variables to be controlled to position the end effectors of a cylindrical base robot. In other words this type of structure forms a cylindrical coordinate system and be controlled the same way.
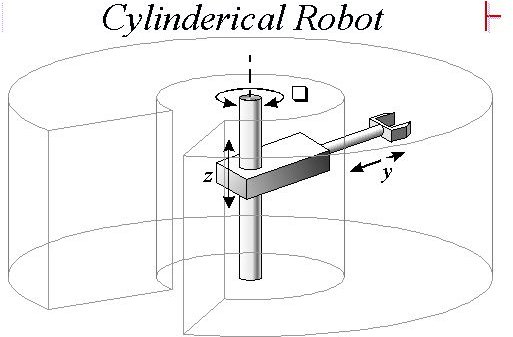
Workspace of Cylindrical Base Robot
The reach of the end of the Cylindrical Robot is a cylinder whose dimensions are determined by the motion limits of the different parts of the robot. But the motion limits of any joint in on the both sides, maximum as well as the minimum.
Thus, the workspace, volume comprised of the points where the end point of the robotic arm can be positioned, is not a complete cylinder but it is an intersection of two concentric cylinders. Dimensions of the inner cylinder are determined by the minimum limits of the motion of robot parts.
Replacing a Cartesian Robot with a Cylindrical Robot
Both the Cartesian and Cylindrical base robots, being able to reach points in the three dimensional space, can be interchanged having common minimum workspace for the application. Each robot base has its own suitable applications. For some applications Cartesian may be more preferred and for other applications Cylindrical Base Robots may be suitable. Even then, the two types can be interchanged with some advantages or disadvantages.
To count as an advantage, Cylindrical Base Robots can move between the required points faster than the Cartesian Robot, especially in the case when the two points are at the same radius. Out of the three motions two are along the same axis. And for disadvantage one can consider the efforts required to make transformation of instructions from the Cartesian coordinate system to the cylindrical coordinate system.
This is not the end! Robot base structures with increased complexity and more manipulation capability are here. In the next article, spherical base structure is covered.
This post is part of the series: Base Bodies of Robots
Robots mounted on base bodies with revolute, cylindrical or spherical joints along with prismatic joints have better functionality and move with ease between the points in space. In continuation of the last series on Robots Base bodies here more involved robotic base bodies are discussed.


