In this concluding article in the series, I explain how inventions changed the face of navigation at sea post the 1500’s, the Columbus era. Read on to discover how marine navigation has morphed from an inexact art to an accurate science today.
The chip log
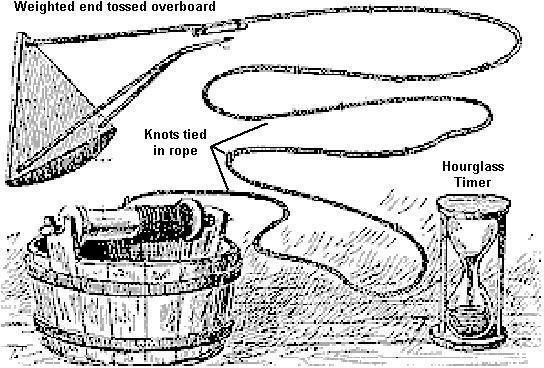
Invented and improved between 1500 and 1600 AD, the chip log- a basic ‘speedometer’, was the first step in the revolution in marine navigation after Columbus. It consisted of a knotted and weighted line which was trailed in the water behind a moving ship. Navigators counted the knots in the rope that were let out in a fixed time and then could calculate speed of the moving ship.
From this instrument and the counting of knots developed a unit of speed still in use today- a knot is one nautical mile per hour.
After the advent of the chip log, we now had means of determining distance at sea. We know from the previous article in this series that latitude was already calculable.
The Mercator Projection and the beginning of modern day charts
In the sixteenth century Gerardus Mercator invented the Mercator chart, which was an event of huge significance. ( also see https://www.brighthubengineering.com/seafaring/23602-a-brief-guide-to-marine-navigational-charts/ )
For the first time, a compass bearing could be shown as a straight line on a navigational chart, resulting in huge savings of distances as mariners could now sail the shortest distance between two points, draw a ‘course line’ (a route to be followed) as a straight line on the chart and navigate with comparative safety.
Mercator charts are widely used at sea even today.
By the early 1700s, magnetic variation was better understood and charts of magnetic variation across the world started becoming available. This made the compass an invaluable weapon in the armoury for navigation. For the first time in history, there was some accuracy possible with magnetic compass readings. (more https://www.brighthubengineering.com/seafaring/23373-marine-magnetic-compass-and-its-use-on-ships/ )
The last frontier, the determination of Longitude
Remember that latitude could be found quite accurately with celestial navigation and older instruments like the astrolabe. However, longitude could only be estimated, because an accurate determination of longitude is made by comparing time differences. The Marine chronometer, invented in 1764, was- upto then- arguable the single most important invention in the history of navigation since the beginning of time. For the first time, a navigator could calculate his longitude with reasonable accuracy using a sextant and a chronometer. This, along with a calculation for Latitude, gave great accuracy and also confidence to a mariner who could now navigate with safety.
More on the chronometer here: https://www.brighthubengineering.com/seafaring/25886-the-marine-chronometer-a-breakthrough-in-celestial-navigation/
Other important inventions
The marine sextant was developed and perfected simultaneously in the UK and the USA in the early 1700’s. It vastly improved the accuracy of celestial navigation and was a great improvement on the astrolabe or cross staff.
The gyroscopic compass (or gyro compass) was invented around 1907. The electrically operated gyro is unaffected by the earth’s variation and has high accuracy. A big improvement on the magnetic compass.
Radars short for “radio detection and Ranging) started appearing before the Second World War. After the war, their use on merchant ships gradually increased. For the first time, land and objects beyond human eyesight could be ‘seen’ and used to find the ships position.
Although there were, at the time, important inventions, the following have now become obsolete- the Direction Finder (position by triangulation of radio waves), Loran, Omega and Decca (hyperbolic radio wave systems for position fixing)
Modern GPS, ECDIS and Integrated Bridge systems
The single most important invention after the chronometer, the GPS (Global Positioning System) gives a modern navigator continuous positions at sea today with great accuracy. It is one of the most relied upon equipment on the bridge of a ship today.
also see ( see https://www.brighthubengineering.com/seafaring/23017-gps-navigation-and-its-use-on-board-ships/ )
ECDIS and Integrated Bridge Systems (IBS): combinations of systems which are integrated are easily available and will soon become widely used for navigation at sea. A modern navigating bridge equipped with ECDIS (electronic charts) and IBS looks like a huge cockpit of an aircraft or spacecraft, with workstations for navigators and advanced computer technology. Inputs from a plethora of instruments, including Radars, charts, gyrocompasses, collision avoidance systems etc are fed into this workstation, making navigation extremely accurate, seamless and safer than it has ever been.
Here is

what an IBS looks like on a modern navigating bridge:
Resources
Chip log diagram: https://www.aerospaceweb.org/
This post is part of the series: History of Marine Navigation
A two article brief on how mankind navigated at sea since the beginning of time.