Ordinary circuits incorporating just a single 555 IC to achieve DC motor speed control may be quite easy to build, but do they really do the job efficiently? Perhaps not. We’ll discuss a much improved circuit here.
Pulse Width Modulation Driver for Motor Speed Control
Building an electronic circuit for achieving DC motor speed control may seem quite simple, and you should be able to find many such ordinary circuits dealing with speed regulation. However, practically you will find that simpler circuits have one serious drawback – they are not able to control the motor speed smoothly at lower levels, and as the desired speed is decreased, the torque of the motor also decreases proportionately. Due to this, at any unpredictable point the motor may just halt very abruptly. Also, during power ON, the motor may just not start up at lower speed settings and may require an initial boost by increasing the setting. Such situations are pretty undesirable and do not constitute an ideal speed control.
The proposed circuit can be considered almost a perfect DC motor speed controller. It is basically a PWM (Pulse Width Modulated) motor driver that incorporates two separate stages for the generation of the pulses. An external variable DC voltage source is effectively translated into a varying PWM signal. The circuit ensures a very well defined and smooth control of the speed of the connected motor even at almost zero speed levels, where the motor barely moves, yet it never stops. The speed transitions can be minutely adjusted with absolutely no “hiccups.” Also, the circuit enables the motor to maintain a high torque and allows starting up instantly when switched ON, even at minimal speed settings. The circuit is also equipped with a change-over switch to enable instant flipping of the motor spin direction, whenever required.
Circuit Description
The circuit functioning may be understood through the following points:
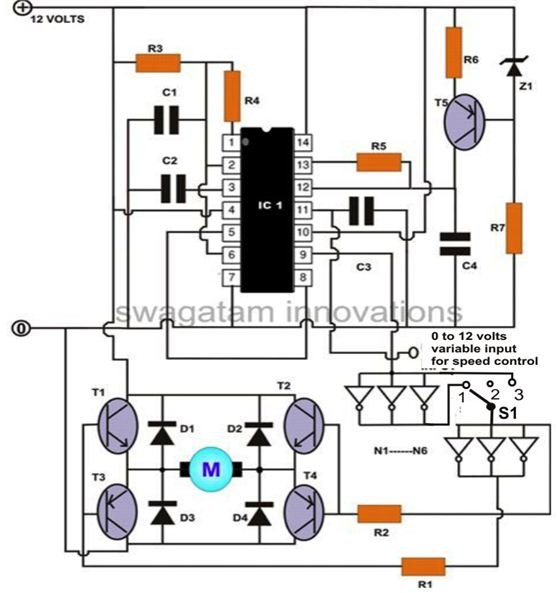
A continuously variable DC voltage needs to be applied externally at pin #11 of the IC to generate proportionately varying PWM pulses. These pulses are further processed and are effectively used to control the connected motor speed right from zero to maximum.
Referring to the figure we see, a dual timer IC 556 forms the heart of the circuit. As the name suggests, the IC consists of two discrete timer sections. This dual feature of the IC has been perfectly exploited here to generate the required PWM pulses.
One half (left hand side) of the IC has been wired as an astable multivibrator. The configuration is used to generate stable and constant oscillations of around 100 Hz.
The above pulses suitably determine the required PWM frequency.
Transistor T5 here performs the function of a constant current source to charge C3.
T5 along with R4 and C3 forms a constant sawtooth wave generator.
The other half (right hand side) of the IC is configured as a voltage comparator.
A continuously variable DC voltage applied at the control input pin #11 of this half of the IC and the different levels of voltage at this point are compared by the generated sawtooth voltage as explained above.
The above operation results in a perfect PWM, which becomes available at pin #9 of the IC.
6 gates from the IC4049 are used for buffering the PWM output before it can be amplified.
Power transistors T1, T2 and T3, T4 are all used to amplify the received PWM signal appropriately for driving the connected DC motor whose speed needs to be regulated.
These transistors are able to handle loads up to 6 Amps quite comfortably. Diodes D1-D4 are all kept to ground for any generated back EMF (inductive surges) by the motor and thus ensure safe operation of the transistors.
A single flick to the switch S1 will enable a “screeching” halt and an immediate subsequent reversal of the motor spin direction, on either side, depending upon the position of S1. This feature may be difficult to find in many other DC motor speed control circuits.
Parts List
All resistors are 1/4W, 5%, CFR, unless otherwise specified.
R1, R2, R6, R7 = 1K,
R3 = 150K,
R4, R5 = 150E,
C1 = 0.1µ,
C2, C3 = 0.01µ,
C4 = 1uF/25V, non-polar
T5 = BC 557B,
T1, T2 = TIP 122,
T3, T4 = TIP 127,
D1 —- D4 = 6 AMP, 300V,
Z1 = 3V/400mw
N1—-N4 = 4049,
IC1 = 556
S1 = SPDT
Back EMF Looped, AC Motor Speed Controller Circuit
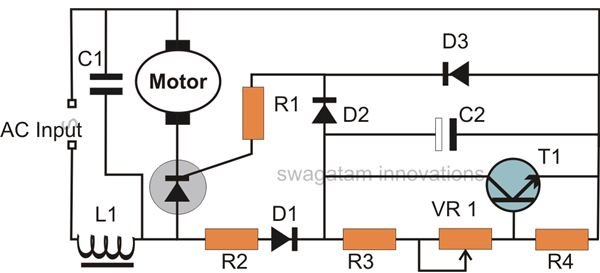
The shown circuit of a back EMF, closed loop AC motor speed controller is presented on request from Mr. Amir, the circuit has the following salient features:
Can be operated with high current AC loads,
The torque is directly proportional to the load,
The back EMF from the motor winding is used as reference for automatically adjusting the torque, as the load is increased.
Parts List
R1 = 56K,
R2 = 33K,
R3 = 15K,
R4 = 22K,
D1, D2, D3 = 1N4007,
T1 = BC547B,
SCR = As per the specified load current
C1 = 104/1KV, PPC
C2 = 100uF/100V
L1 = 30 to 50 uH, 6 Amp.
Do you have any such requests? Do let us know, if feasible will be produced here in Bright Hub.


