In this article let us understand repulsion motors in detail including their design, construction and theory of operation.
Introduction
Repulsion motors are classified under Single Phase motors . In magnetic repulsion motors the stator windings are connected directly to the ac power supply and the rotor is connected to commutator and brush assembly, very similar to that of DC armature. Let us discuss the constructional features and principle of repulsion motors in detail.
Construction
Repulsion motors consist of a stator, rotor, commutator and brush assembly.
The stator is mostly of non-salient pole type provided with slots. The rotor is connected to the commutator which is identical to the construction of DC armature. The windings of rotor are of distributed type. They may be either lap winding or wave winding. Repulsion motors consists of a commutator which may be of axial type or vertical type. Carbon brushes are used to conduct current through the armature.
The principle difference between an AC series motor and repulsion motors is the way in which power is supplied to armature. In Ac series motor the armature receives voltage by conduction through the power supply. But In repulsion motors the armature is supplied by induction from the stator windings.
Principle Of Repulsion Motors
Now let us understand the theory behind the production of rotating magnetic field using the repulsion principle.
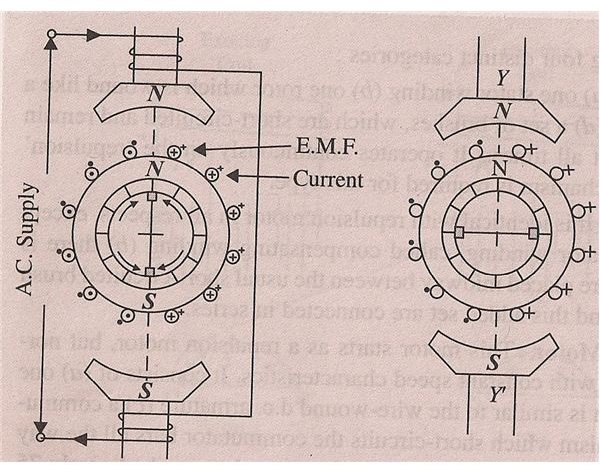
Repulsion motors are based on the principle of repulsion between two magnetic fields. Consider a 2-pole salient pole motor with vertical magnetic axis. For better understanding of the principle here we use a salient pole type instead of non-salient pole type, since the basic functioning of both the construction is same. The armature is connected to commutator and brush. The brushes are short circuited using a low-resistance jumper.
Now when alternating current is supplied to field or stator winding, it induces an emf in the armature. The direction of alternating current is such that it creates north pole at the top and south pole at the bottom. The direction of induced emf is given by Lenz law, according to which the direction of induced emf is so as to oppose the cause producing it. Now the induced emf induces the current in the armature conductors. The direction of induced current in the armature conductors depends on the position of the brush.
If the brush axis is along the direction of the field (or) if the brush axis is collinear with the magnetic field, the armature behaves like an electromagnet and so an N-pole is formed directly below the N-pole of the stator and S-pole is formed directly above the S-pole of the stator. Now the net torque at this condition is zero. Both the N-poles repel each other and Both the S-poles repel each other. The two repulsion forces are in direct opposition to each other and hence no torque will be developed in this condition.
In other words we can say that the torque developed in four quadrants around the brushes neutralizes each other and hence the net torque is 0.
In the above condition the brush axis is along the axis of the magnetic field. Now let us consider that the brushes are shifted through 90 degree, so that the magnetic axis is perpendicular to the brush axis. Since the brushes are shifted through 90 degree, the coils undergoing short circuit also changes. So apart from the coils undergoing short circuit, the voltage induced in the other coils between the brush terminals gets neutralized and the net voltage is zero. Since there is no induced emf, there is no current in the circuit and hence there is net torque develop in the circuit is zero. In other words no torque will be developed in the circuit.
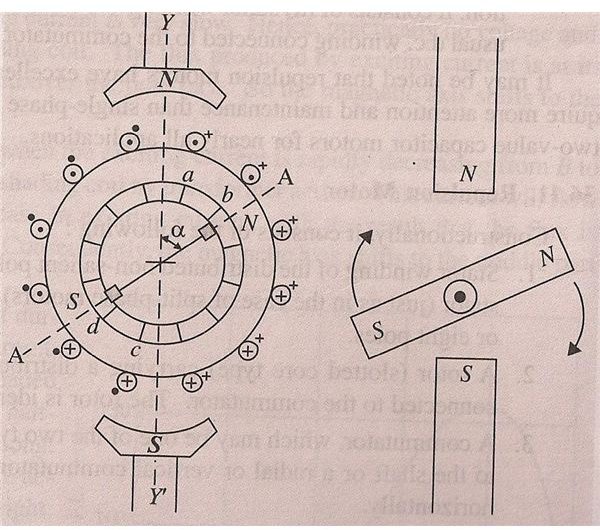
Now consider a situation where the brush axis is neither along the magnetic axis nor perpendicular to the magnetic axis. The brush axis is displaced at an angle α to the magnetic axis. Now a net voltage is induced in the brush terminals which will produce current in the armature. Due to the current in the armature circuit, it will produce its own magnetic field with North and South poles. But in this condition North Pole is not directly under the north pole of Magnetic axis and South Pole is not directly above the South Pole of magnetic axis. The poles of armature are slightly displaced from that of the poles of the stator (or) the main magnetic field.
So during this condition the N-pole of main field will repel the N-pole of the rotor field and similarly S-pole of main field will repel the S-pole of the rotor field. So the rotor starts rotating in a particular direction. The direction of rotation of motor is determined by the position of the brushes with respect to the main magnetic field or magnetic field of the stator. In other words the direction of rotation is determined by the direction of brush shift. If the brushes are shifted clockwise from main magnetic axis, then the motor will rotate in clockwise direction. If the brushes are shifted counter clockwise from the main magnetic axis, then the motor rotates in anti clockwise (or) counter clockwise direction.
The value of starting torque of repulsion motors is determined by the amount of brush shift α from the main magnetic axis. The maximum torque is obtained for the brush shift of 45 degrees. In other word maximum torque occurs when α=45 degrees. Brush shift also helps in speed control of repulsion motors.
Thus we have discussed the construction and principle of repulsion motor in detail. In the next article let us discuss the various types of Repulsion motors in detail.
Image and Content Courtesy
Hughes, A. (2005) Electric Motors and Drives, Third Edition: Fundamentals, Types and Applications. Burlington: Newnes Publishers


