The slip ring induction motor has two distinctly separate parts, one is the stator and other is the rotor. The stator circuit is rated as same in the squirrel cage motor, but the rotor is rated in frame voltage or short circuit current
Introduction
In my last article, we have discussed everything on squirrel cage induction motors including its dis-advantages. To overcome these disadvantages, slip ring induction motors have been developed, with better starting characteristics and better current drawing characteristics. In this article, we will discuss on the starting method and characteristics of slip ring induction motors with its applications.
Starting Of Slip Ring Induction Motors
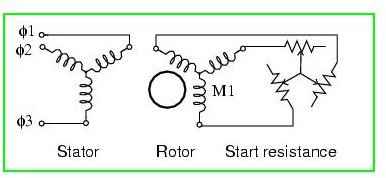
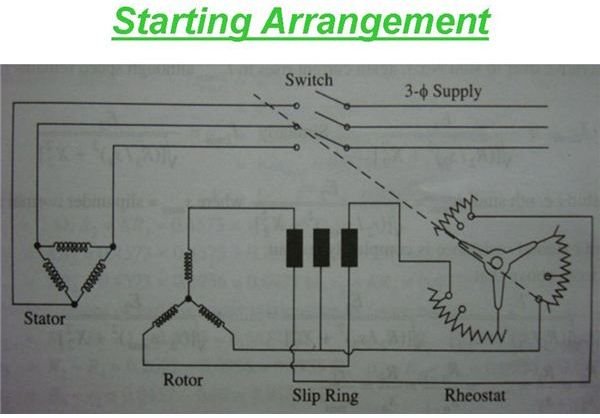
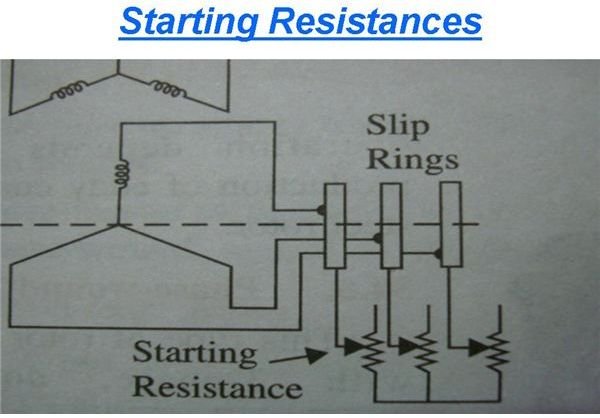
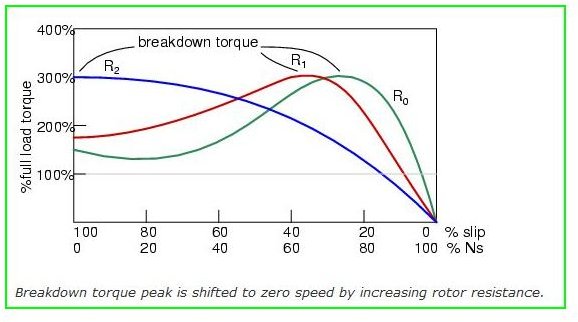
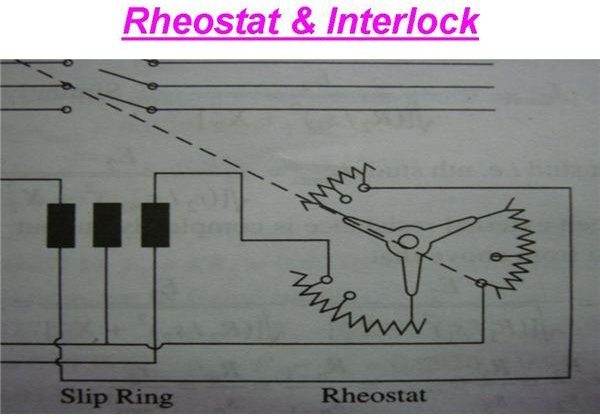
These motors are usually started with full line voltage applied across its terminals. As these motors have external resistance connected to its rotor circuit, the value of starting current is adjusted or kept minimum, by increasing the resistance of the rotor circuit. This external resistance can be assumed to be a form of rheostat, connected in star, thus kept at maximum when the motor starts and gradually cut-out as the motor gathers speed. It has been already discussed in my last article on “Slip Ring Induction Motors..!!,” that increasing the rotor resistance, not only reduces the rotor current, but the stator current too. This implies that the starting current of the motor is reduced when an external resistance is added in the rotor circuit. Thus because of this, the starting torque is increased due to the improvement in power factor.
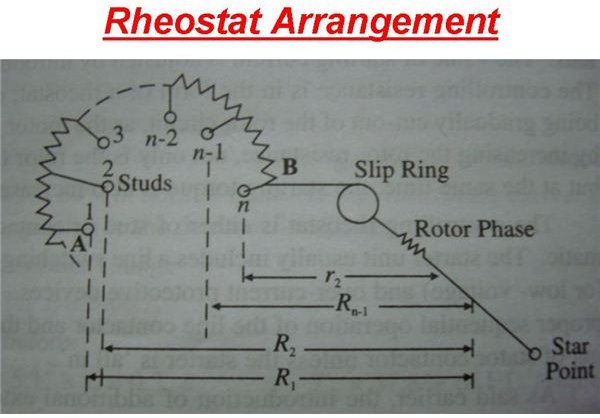
The controlling rheostat may be of either stud or contactor type. It may be either hand operated or sometimes automatic. The 3-phase supply to the stator has a switching contactor along with over-load and no or low-voltage protective devices. There might be also an interlock provided to ensure the proper sequential operation of the control gear and starting devices.
As these motors have considerably high starting torque with low starting current, these motors can be started on load. The external resistance is used only for the starting purpose, after which the motor gradually picks up the speed, the resistance gradually cut-off. These rings are isolated after the motor reaches its rated speed. The carbon brushes are lifted and the rings are short circuited thus making them very similar to squirrel cage motors.
Applications of Slip Ring Induction Motors
These motors are used where the load is intermittent and comes on very sharply for brief periods, such as a punching machine. A heavy flywheel is fitted in the drive, preferably between the work and any speed-reduction gears. The flywheel shares the load with the motor, thus enabling a motor of lower rating to be employed. For load sharing to take place automatically, the motor speed should drop considerably as the load increases and this is ensured by using a motor having a high full-load slip, say for example 10%.
Characteristics Of Slip Ring Induction Motor
The slip ring induction motor has two distinctly separate parts, one is the stator and other is the rotor. The stator circuit is rated as same in the squirrel cage motor, but the rotor is rated in frame voltage or short circuit current. The frame voltage is the open circuit voltage when the rotor is not rotating and gives the measure of turns ratio between the stator and rotor. The short circuit current is the current flowing when the motor is operating at full speed, with the slip rings shorted and the full load applied to the motor shaft.
Qualities Of Slip-Ring Motors:
1. suited for high inertia loads as it caters with excellent starting torque,
2. Low starting current when compared to squirrel cage induction motors,
3. Speed is varied with the help of external resistance, from 50% to 100% of the full speed,
4. Higher brush and slip ring maintenance required,
5. As the brush wears out, it may lead to intermittent contact, and thus heavy sparking.
Thus we have seen in detail the starting arrangement of slip ring induction motors. In my next article, we will discuss on the speed control of slip ring induction motors.
Image Credits
- All About Circuits Website
- Marine Electrotechnology


