The reason for the name “Squirrel cage” is because of the type of rotor used in these motors. Almost 95% of the induction motors used is of squirrel cage type. Also know about the Double Squirrel Cage motor. Know about the different classes of Squirrel cage Induction Motors
Introduction
We have seen the classification of A.C. motors and discussed in detail the working principle, concept behind rotor rotation and many other aspects of induction motor. Now let us discuss in detail, the most common form of induction motor, the “Squirrel cage” induction motor. The reason for the name “Squirrel cage” is because of the type of rotor used in these motors. Almost 95% of the induction motors used is of squirrel cage type. And in the previous article on Types of Electrical Motors, we have classified Induction Motors based on the type of rotor used. They are
-
Squirrel Cage Induction Motors &
-
Slip-Ring or Wound-rotor Induction Motors
Construction Of Squirrel Cage Induction Motor
Any Induction Motor has a Stator and a Rotor. The construction of Stator for any induction motor is almost the same. But the rotor construction differs with respect to the type which is specified above.
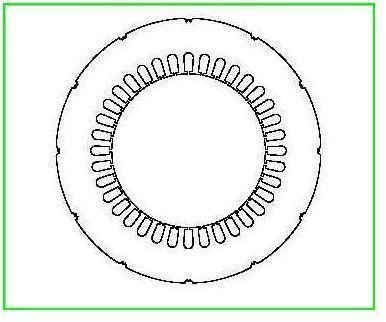
Stator:
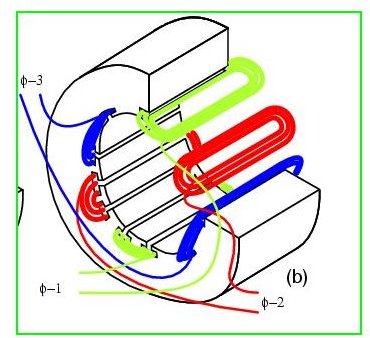
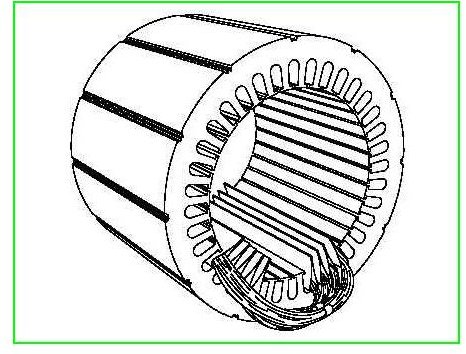
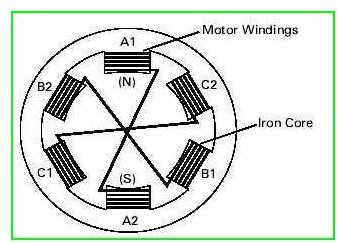
The stator is the outer most component in the motor which can be seen. It may be constructed for single phase, three phase or even poly phase motors. But basically only the windings on the stator vary, not the basic layout of the stator. It is almost same for any given synchronous motor or a generator. It is made up of number of stampings, which are slotted to receive the windings. Lets see the construction of a three phase stator. The three phase windings are placed on the slots of laminated core and these windings are electrically spaced 120 degrees apart. These windings are connected as either star or delta depending upon the requirement. The leads are taken out usually three in number, brought out to the terminal box mounted on the motor frame. The insulation between the windings are generally varnish or oxide coated.
The Rotor: Squirrel Cage Rotor:
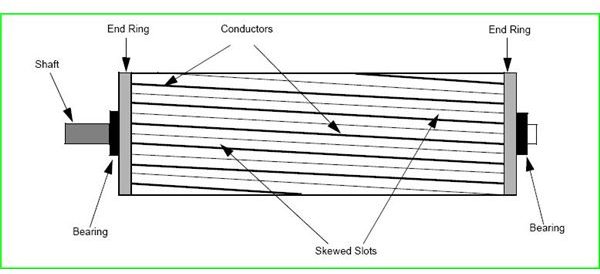
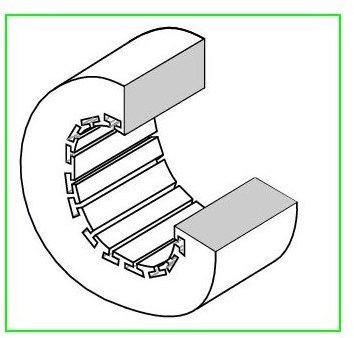
This kind of rotor consists of a cylindrical laminated core with parallel slots for carrying the rotor conductors, which are not wires, as we think, but thick, heavy bars of copper or aluminium (aluminium) or its alloys. The conductor bars are inserted from one end of the rotor and as one bar in each slot. There are end rings which are welded or electrically braced or even bolted at both ends of the rotor, thus maintaining electrical continuity. These end rings are short-circuited, after which they give a beautiful look similar to a squirrel thus the name.
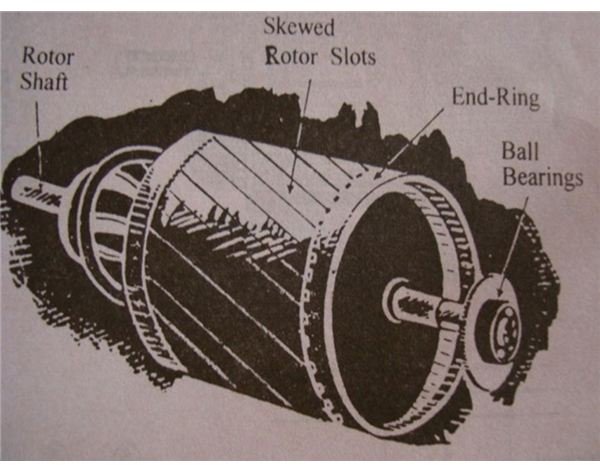
One important point to be noted is that the end rings and the rotor conducting bars are permanently short-circuited, thus it is not possible to add any external resistance in series with the rotor circuit for starting purpose. The rotor conducting bars are usually not parallel to the shaft, but are purposely given slight skew. In small motors, the rotor is fabricated in a different way. The entire rotor core is placed in a mould and the rotor bars & end-rings are cast into one piece. The metal commonly used is aluminium alloy. Some very small rotors which operate on the basis of eddy current, have their rotor as solid steel without any conductors.

Reasons for Having Skewed Rotor
-
It helps in reduction of magnetic hum, thus keeping the motor quiet,
-
It also helps to avoid “Cogging”, i.e. locking tendency of the rotor. The tendency of rotor teeth remaining under the stator teeth due to the direct magnetic attraction between the two,
-
Increase in effective ratio of transformation between stator & rotor,
-
Increased rotor resistance due to comparatively lengthier rotor conductor bars, &
5. Increased slip for a given torque.
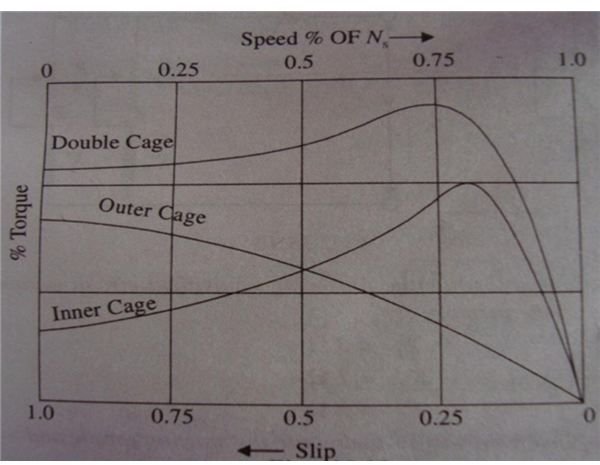
Double Squirrel Cage Motor
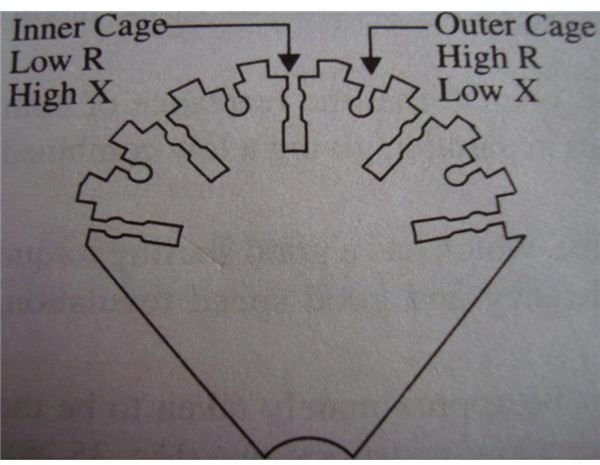
We have already discussed that the rotor which is of squirrel cage type has two end rings, which are permanently shorted with the rotor conductors. Thus external resistance could not be added to the rotor circuit. Since the rotor has a very low resistance, the starting torque was very poor. The starting torque could be increased by having a cage of high resistance, but the motor will have a very poor efficiency during normal running conditions, as there will be more Cu losses. So Mr. Boucheort, came up with a motor, which had two independent cages on the same rotor. The outer cage consists of bars of high resistance metal, whereas the inner cage has low-resistance copper bars. Thus the outer cage has a high resistance with low reactance to resistance ratio and the inner cage has low resistance but high reactance to resistance ratio. Thus the outer cage develops a maximum torque at starting, while the inner cage does so at about 15% slip.
Standard Types of Squirrel Cage Motors
The three phase Squirrel cage induction motors are classified into 6 different standard types based on their electrical characteristics. They are differentiated in the below table:
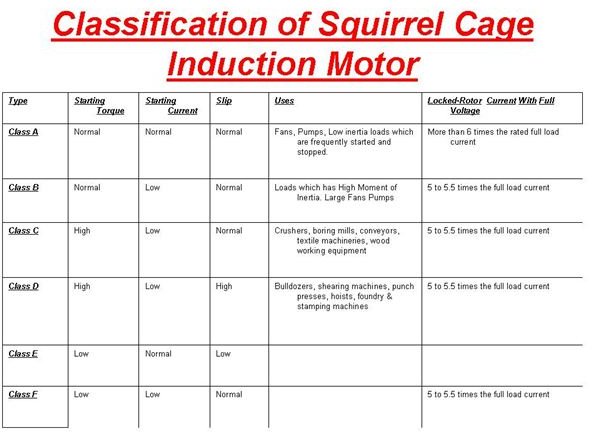
Remarks:
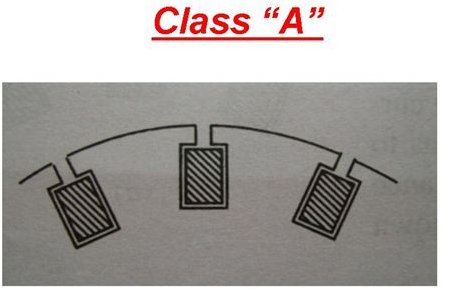
Class A: The squirrel cage rotor has relatively low resistance & reactance. The general construction of the slots in the rotor is such that the rotor bars are placed close to the surface so as to reduce the reactance.
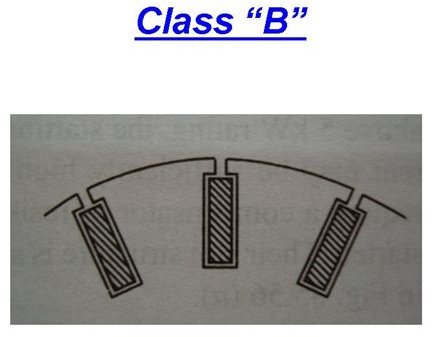
Class B: These motors can be started at a full-load while developing normal starting torque. The rotor is constructed with deep and narrow slots so as to obtain high reactance while starting. These motors are well suited for those applications where there is a limitation in starting current. These motors can also be started with reduced voltage.
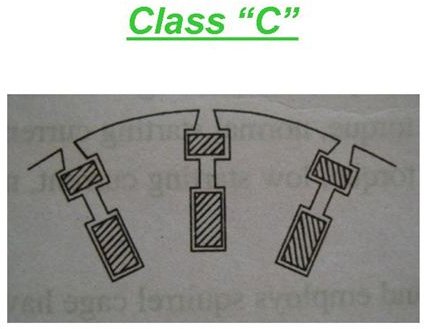
Class C: These are double squirrel cage motors. These double squirrel rotors combine high starting torques with low starting currents. These motors have inherent high starting torque characteristics and suitable for reduced voltage starting.
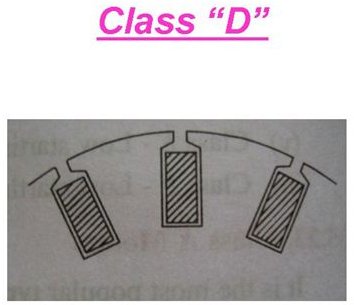
Class D: These motors have high starting torques which is achieved by design of the rotor slots. These rotor slots have thin rotor bars, which make the leakage flux of the rotor low and the useful flux high.
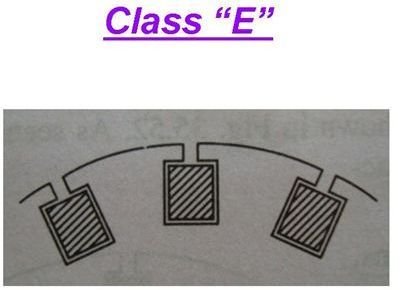
Class E: These motors have relatively very low slip at rated load. For motors above 5 Kw rating, the starting current may be sufficiently high as to require a compensator or a resistance starter.
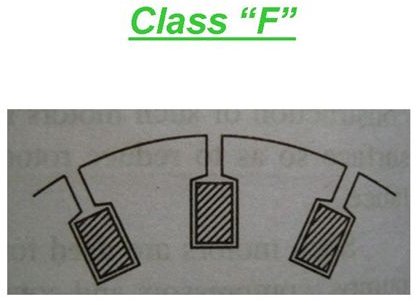
Class F: These motors combine low starting torque with low starting current and may be started with full voltage. This is achieved by the design of the rotor slots which is displayed in the figure.
In the next article, we will deal about the starting procedure and the different methods adopted in starting a squirrel cage induction motor. Also various methods of speed control will be emphasized.
Image & Content Credits
Clayton Engineering
Audel Electric Motors by Miller & Richard
A.C-D.C machines by A.K & B.L.Theraja
Electric Motors by Jim Cox


