A DC series motor converts electrical energy to mechanical energy. Its principle of operation is based on a simple electromagnetic law that states that when a magnetic field is created around current carrying conductor and interacts with an external field, rotational motion is generated.
The key components of a DC series motor are the armature (rotor), stator, commutator, field windings, axle, and brushes. The stationary part of the
motor, the stator is made up of two or more electromagnet pole pieces, and the rotor is comprised of the armature, with windings on the core connected to the commutator. The output power source is connected to the armature windings through a brush arrangement connected to the commutator. The rotor has a central axle about which the rotor rotates.
The field winding should be able to support high current because the greater the amount of current through the winding, the greater will be the torque generated by the motor. So the winding of the motor is made up of thick heavy gauge wire. Heavy gauge wire does not allow a large number of turns. The winding is made up of thick copper bars as it helps in easy and efficient dissipation of heat generated as a result of flow of large amount of current through winding.
Principle of Operation
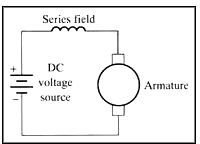
An external voltage source is applied across the series configuration of field winding and armature. So one end of the voltage source is connected to the winding and the other end is connected to the armature through the brushes.
Initially at the motor start up, with the voltage source connected to the motor, it draws a huge amount of current because both the winding and the armature of the motor, both made up of large conductors, offer minimum resistance to the current path. The large current through the winding yields a strong magnetic field.
This strong magnetic field provides high torque to the armature shaft, thus invoking the spinning action of the armature. Thus the motor starts rotating at its maximum speed in the beginning. The rotating armature in the presence of the magnetic field results in counter EMF, which limits the current build up in the series combination of armature and winding.
Thus series motors once started will offer maximum speed and torque but gradually, with an increase in speed, its torque will come down because of its reduced current. Practically this is what required from the motors. Due to the high torque provided by the armature, the load on the shaft is set to rotate initially. Subsequently lesser torque will keep the load on the move. This further helps in increasing the heat dissipation of the motor. However, the amount of torque generated by motor is directly proportional to the winding current. The higher current demands a higher power supply, too.
Motor Speed
In DC series motors, a linear relationship exists between the amount of torque produced and the current flowing through the field windings. The speed of the motor can be controlled by varying the voltage across the motor, which further controls the torque of motor.
To increase the speed of the motor, decrease the field current by placing a small resistance in parallel to the winding and armature. The decrease in current will result in lowering of magnetic flux and counter EMF, which further hastens the motor’s speed.
To decrease the speed, use an external series resistance along with the field winding and armature. This will reduce the voltage across the armature with the same counter EMF, thus resulting in a lower speed of motor.
Unlike DC shunt motors , series motor does not operate at the constant speed. The speed of the motor varies with change in the shaft load, so speed control of the motor is not easy to put into practice.
Applications, Advantages and Precautions
Series motors can produce large turning effect, or torque, from a stand still. These motors have found application in small electrical appliances where high torque is necessary at start up. DC series motors are used mainly for industrial applications, e.g. elevator and pulley and winches systems for carrying heavy loads. Heavy and magnificent cranes drawing thousands of amperes are driven by this motor. An automobile engine can be started by this motor which draws around 500A of current. However, these motors are not suitable where constant speed is required as the speed of series motors is dependent (varies with load) on load unlike DC shunt motors (see link below for an article similar to this one that covers DC shunt motors) whose speed is independent of load.
The construction, designing, and maintenance of these motors is very easy. Series motors are cost effective as well. A final advantage of series motors is that they can be used by providing either an Alternating Current (AC) or Direct Current (DC) power source.
Proper care should be taken that a series motor is not operated without any load as they are totally dependent on shaft loads. As the armature speed increases, the current through the winding decreases which further helps in reducing the counter EMF. This reduction fastens the speed of the armature. As this process continues, the motor speed increases beyond the limit thus causing devastation to the motor.
References
- Image Courtesy, Awn Muhammad
- DC Series Motors, http://zone.ni.com/devzone/cda/ph/p/id/53
- Series Motors, http://www.tpub.com/content/neets/14177/css/14177_58.htm
- Bright Hub: Understanding Shunt-Wound DC Motors
- Series DC Motor, http://www.lmphotonics.com/DCSpeed/series_dc.htm
- Bright Hub: Build a DC Motor Speed Controller Circuit


