Stepper motors have become favorites of industry motor applications simply because these machines exhibit accurate responses to applied electrical pulses and there are easier to control. This article explains stepper motors, how they work, and the associated pros and cons of their use.
A stepper motor is a device which requires an input electrical potential difference to operate and converts it into discretely incrementing rotational movement of its central rotor/shaft mechanism.
The rotation of the spindle is executed through discrete steps which are in response to the applied electrical pulses. Since the speed and the increment produced by the motor spindle mechanism may be crucially connected to the frequency and the length of the input electrical supply respectively, the applied pulses need to have a definite synchronization with the motor in order to influence correct operations and are therefore obtained through digitally controlled circuits.
Stepper motors are used in applications where a controlled movement of the various parameters may be required. Specifically when the operations involve critical rotational angle, speed, synchronization, etc. the use of stepper motors become imperative. Some typical applications of these machines include computer printers, HD drives, critical medical equipment, fax machines, plotters etc., to name just a few.
Types of Stepper Motors
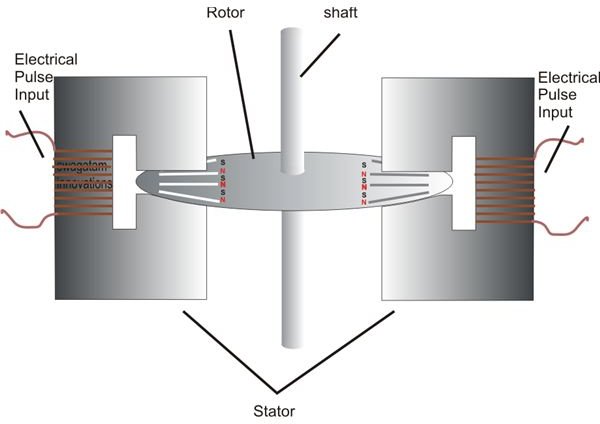
Permanent Magnet (PM): Also called “tin can” or “can stock,” these are a cheap, low resolution type of stepper motors having step angles of typically 7.5 to 15 degrees (48 to 24 steps per revolution.)
The working concept of a PM stepper motor can be understood through the illustration provided below. (Please click to enlarge.) The type utilizes permanent magnets and eliminates the employment of rotor teeth or steps normally associated with the other more sophisticated types of stepper motors. Instead the rotational effect is produced through alternate magnetization of the rotor plate. The electrical pulses applied to the windings generate induced magnetic flux alternately which influence the permanent magnets of the rotor. The effect of these interacting magnetic fluxes produces the high torque levels responsible for the required rotations.
The above mechanism with PM stepper motors make them comparatively more efficient than the variable reluctance types.
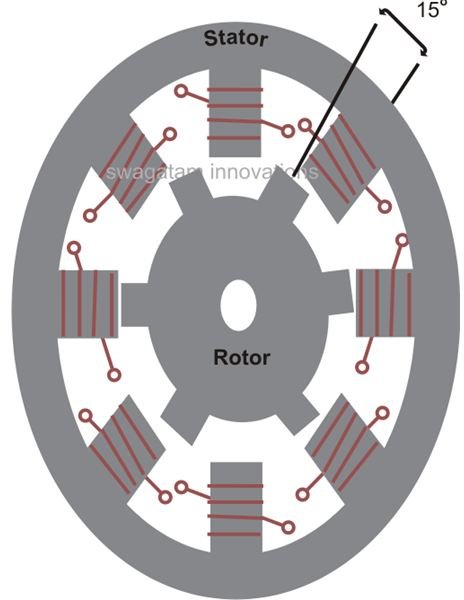
Variable reluctance (VR): This type of stepper motor primarily consists of a central rotor cylinder/shaft assembly made of multiple toothed elevations over its entire radial surface. The stator assembly, which consists of several layers of super enameled copper wire wound over laminated iron stampings, is kept closely attached with the rotor. The electrical pulses applied to the stator windings produce alternately sequencing magnetic fluxes over the rotor teeth creating a twisting effect. These alternate push/pulls and twisting of the rotor give rise to the required revolutions and the torque to the rotor/shaft assembly.
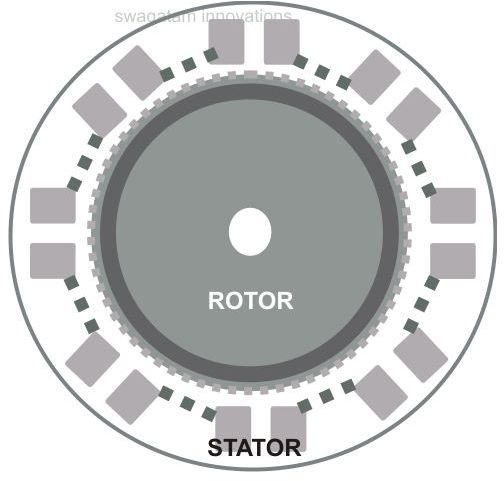
Hybrid (HB): The stepper motors included in this type are more expensive than the above types due to the following interesting features:
- Hybrid stepper motors have improved step resolution with increment angles ranging from 3.6 to 1 degree for 100 to 400 steps per revolution respectively.
- The system incorporates the advantages of both PM and VR types and utilizes a special arrangement of permanent magnet poles over the entire concentric multi-toothed rotor/shaft assembly.
- The multi-toothed rotor assembly exhibits excellent coordination with the magnetic fluxes generated by the stator windings, which guides the rotor movement in a well-controlled manner across the intermediate air gaps.
The above operations of the hybrid type produce more dynamic torque resolutions and high efficiency compared to the PM and the VR types.
Stepper Motor Merits and Demerits
The following are their main advantages associated with stepper motors and the way they work:
- The rotation angle show perfect synchronization with the applied electrical pulses.
- Even during minimum speeds or stationary periods the motor may exhibit full torque with the stator energized.
- These motors produce outstanding start-up, stop, and reversing response and adaptability.
- Being brushless means minimum wear and tear and therefore increased operating life; the bearing conditions can affect the performance, though.
- Controlling a stepper motor becomes comparatively easier than a DC motor due to its open loop operating feature, which enables accurate control of motor movements directly by adjusting the applied electrical pulses, thus avoiding the use of complex feedback circuitries. The feature also helps to enforce a wide range of rotational speeds.
However there are a few disadvantages too with stepper motors, albeit most are quite negligible.
- With high speeds, controlling these motors become difficult and if the speed control goes unmonitored can sometimes give rise to resonance and a ringing effect in the motor.
- Another serious issue that may be associated with stepper motors is that the applied input electrical pulses need to be absolutely consistent and flawless. This is because the windings inside a stepper motor needs constant changeovers, and therefore fixed DC inputs can become highly undesirable.
- A malfunction with the circuit generating these pulses can spell disaster with the motor and burn it out within seconds.
For instance, if due to some faulty conditions the applied input stops alternating and latches to produce direct currents would mean a particular winding being loaded with huge DC current, which would ultimately cause heating and burning of the particular part of the stator winding. Though this can be avoided by adding additional precautionary circuits and definitely can’t go unheeded.
However unlike regular DC motors, stalling of a stepper motor due a possible external jamming will never burn it out, so one can be sure that it’s only the driver circuit that may be responsible for the possible damages.
References
-
Engineer’s Garage - http://www.engineersgarage.com/articles/stepper-motors
Stepper Motor Basics - http://www.solarbotics.net/library/pdflib/pdf/motorbas.pdf
Image drawn by the author, courtesy - http://www.solarbotics.net/library/pdflib/pdf/motorbas.pdf


