
The DC spur gearhead motor utilizes an ordinary DC motor to operate a series of spur gearheads that are meshed together. This results in a simple yet effective component of many electronic devices that rely on rotational mobility.
Introduction
Gearhead motors commonly consist of a DC brush motor and a gearbox attached to the shaft. Motors are distinguished as a gearhead by two connected units.
Gearhead motors tend to reduce the speed of the motor but with a corresponding increase in torque, or the twisting force. This property comes in handy, as DC motors can rotate at speeds much too fast for an electronic device to makes use of. Therefore, a gearhead reduction enables the device to hold heavier loads while the motor spins at an appropriate speed.
The Spur Gear head Motor
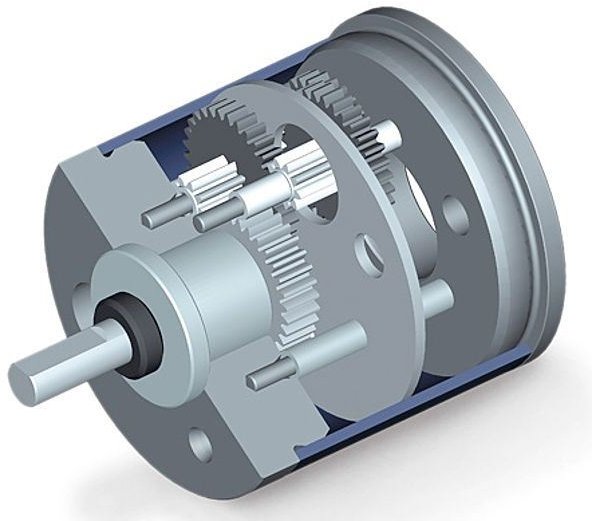
Spur gearhead motors begins simply with a standard DC motor. The next major component is the spur gearbox. This consists of a series of small gears that mesh with larger gears, and placed in a rigid frame. The gears are greased to minimize friction and then secured in a gearbox cover to avoid debris from entering and disrupting the gears. Finally, a pair of screws fastens the gearbox on top of the DC motor.
A spur gear can be a disk or cylinder with teeth or cogs pointing out radially along the perimeter. These teeth mesh with another toothed gear to transmit torque. On the spur gearhead motor, the DC motor shaft is connected to the first smaller gear and causes it to turn when the motor is operating. This gear is meshed with a larger gear, thus causing it to turn as well. Since the smaller gear has fewer teeth, it spins faster. For instance, if the smaller gear consists of 12 teeth and the larger one 40, then the smaller gear will spin three and a third times(40/12) while the larger one will spin once. Moreover, if the motor supplied the smaller gear with 6000 RP

M, the larger gear wools sustain an RPM of 18000. This is given by the following computation:
Small gear RPM * small gear teeth / large gear teeth = large gear RPM
6000 RPM * 12 teeth / 40 teeth = 1800 RPM
It may seem that there is some “waste” of energy, as 6000 RPM is only being converted to 1800 RPM, but instead what is happening, the larger gear has an increased torque of 3 and 1/3 times. Therefore, by placing a series of small and large gears together, the motor speed decreases as the torque increases.
The last gear in the gearbox is connected to the output shaft. This shaft can be connected to wheels and other such things to operate.
Imperfect Speed to Torque Conversion

Any mechanical system, no matter how skilfully designed, will have some form of friction that reduces its output energy. In a DC spur gearhead motor, all the gears meshed together produce a lot of friction. In fact, gearboxes are typically 40% to 90% efficient. This inefficiency prevents the gearbox from converting all of the motor speed into torque. Nonetheless, gearhead motors convert the motor speed better than if the voltage were to be lowered. Although friction is inescapable, the advantages of using DC spur gearhead motors should not be underestimated.
Images Courtesy
- DC Spur Gearhead Motor:https://www.active-robots.com/products/motorsandwheels/gear-motors/ghm-01-250.jpg
- Spur Gearbox:https://img.directindustry.com/images_di/photo-g/spur-gear-reducer-42899.jpg
- Meshed Gears:https://www.hercus.com.au/media/pics/site/imagecache/45D572B29E6BEA7CC3FFA840AC1BD8BC.jpg
- Output Shaft:https://img.directindustry.com/images_di/photo-g/planetary-gearbox-for-stepper-motors-154602.jpg
About the Author
Terry Ligard is a fourth year mechanical engineering student at the University of Alberta. Terry has several months of experience building electromechanical transporters.


