
One of the main factors that differentiates robots and other chip-bearing devices is the ability to move. Most robots that move owe this ability to the DC, or Direct Current, motor. Although there are different types of DC motors, one is the iron-core permanent-magnet DC brush motor.
The Components of an Iron-Core Permanent-Magnet DC Brush Motor
The iron-core permanent-magnet DC brush motor is made up of stationary parts, the stator, and rotating parts, the rotor. Th
e end of a motor includes the cap which is attached to the stator.
Stator
A typical stator consists of two permanent magnets opposite each other in a metal cylindrical shell. The term “permanent magnet” is used to mean that the magnets keep their magnetic properties even without electricity. The electric current is used to create a magnetic field which attracts and repulses the magnets. However, after excessive rotations, the motor does begin to heat up. When temperatures
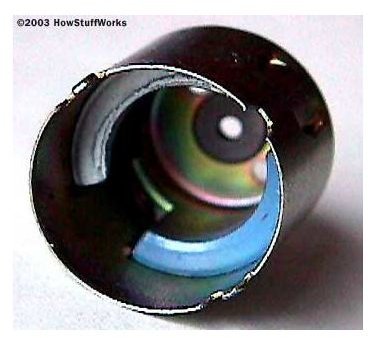
reach high levels, permanent magnets being to lose their magnetic properties, which can prevent the motor from working at all. Two ways to avoid overheating a motor is to incorporate sufficient ventilation in the robot, and to place the motor against another metal body in order to allow a passage for heat to travel away from the motor.
Rotor
The rotating part of a motor is constructed around a shaft. The shaft extends out of the motor in order for objects such as wheels and a fan to be attached to it.

Rotor Windings
The center of the shaft contains an armature with windings of wire. This wire is looped around an iron core and carries electricity. The many windings strengthens the magnetic field which allows for the rotation motion.
Rotor Com

mutator
In order for the rotor windings to carry electricity, they must first receive it by means of a commutator. The rotor commutator is located near one end of the shaft and is comprised of metal segments which make contact with metal brushes. This contact allows for an electric current to travel from the power wires to the rotor windings. While the commutator rotates, the windings change from being connected to a positive terminal to a negative terminal, which causes electricity to flow in opposite directions. Therefore, the magnetic field induced by the flow of electricity also changes between attraction and repulsion.
Rotor Brushes

The rotor brushes are connected to a power source, acting as a passageway for electricity to travel to the rotor commutator. However, this occurs only when the commutator touches against the brushes firmly. Otherwise, electricity will stop flowing. Unfortunately, this leads to the major downside of DC brush motors. The contact between the commutator and the brushes produces friction and heat, which decreases the motor’s speed and efficiency.
Conclusion
Robot builders who take mobility into consideration in their work know that DC motors are critical in allowing robots to move. Furthermore, their simplicity make it accessible to robot builders of all levels of expertise. The iron-core permanent-magnet DC brush motor is only one kind of DC motor that can be incorporated in a robot. However, the knowledge of how this simple DC motor functions will enable one to pursue more complex motors.
Images Courtesy
DC motor: https://www.inverter-china.com/blog/upload/DC-Motor.jpg
Stator: https://www.hooked-on-rc-airplanes.com/images/motor-stator.jpg
Rotor Windings: https://upload.wikimedia.org/wikipedia/en/8/80/Electric_Motor_Rotor.jpg
Rotor Commutator: https://images.gasgoo.com/MiMwMDRfMDA0IzI2MDcwMTEwMA–/auto-part-commutator-for-dc-motor.jpg
Rotor Brushes: https://65.13.2.16/images/blk_mtr_brushes.JPG
About the Author
Terry Ligard is a fourth year mechanical engineering student at the University of Alberta. Terry has several months of experience building electromechanical transporters.


