
Articulated Robots are no doubt the best robots for assembly and packaging applications. SCARA and PUMA are the most widely used articulated robots in industries for assembly and packaging and in academia for research and analysis. Read more about these variants of articulated robots SCARA and PUMA.
SCARA – Selective Compliant Assembly Robot Arm
SCRA is also called as Selective Compliant Articulated Robot Arm. This robot was developed by a team at Yamanashi University in Japan headed by Professor Hiroshi Makino. It is a simple articulated robot which can perform assembly tasks precisely and fast. SCARA is most adept in pick and place operations in any assembly line in industries with speed as well as precision. SCARA is more or less like a human arm the motion is restricted horizontal sweeping and vertical movement, it cannot rotate along an axis other than vertical.
Structure of SCARA
The base structure of SCARA is a chain of rigid members connected through parallel revolute joints. The axes of these revolute joints are all vertical. Some SCARAs have linear motion along the vertical axis at the base and can also have vertical motion of the wrist attached to the end member. The parallel axis structure of SCARA makes it flexible or compliant in the XY direction and rigid in the vertical or Z direction. SCARA’s name is derived this way only by being selectively compliant. Such structure makes SCARA adept in pick-and-insert operations used mostly in assembly of electronics circuit and devices.
PUMA - Programmable Universal Machine for Assembly
PUMA is the most commonly used industrial robot in assembly, welding operations and university laboratories. PUMA was designed by Vic Schienman at MIT in mid seventies and was first manufactured by Unimation. PUMA resembles more closely to the human arm than SCARA. PUMA has greater flexibility than SCARA but with the increased compliance comes the reduced precision. Thus, PUMA is preferably used in assembly applications which do not require high precision, such as, welding and stocking operations.
Structure of PUMA
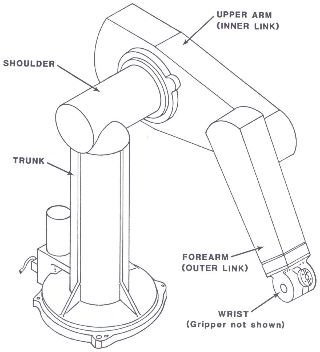
PUMA is an articulated robot with a chain of members connected with each other through revolute or rotary joints as that in SCARA but the difference is the orientation of the axes of the joints. In PUMA not all the joints are parallel; the second joint from the base is orthogonal to the other joints. This makes PUMA compliant in XY as well as in Z direction. In all PUMA has six degree of freedom. Each rotary joint is actuated by DC servomotors and accompanying gear trains. The flexibility of the PUMA makes it capable of being taught to perform various tasks.

