It is not only important to safeguard an engine against wild speed fluctuations with changing load, but also to provide a mechanism for emergency shutdown in case of L.O. failure. Learn how this dual function is achieved using a single device.
Introduction
We have been studying about engine governors and their uses on board all types of ships . We also studied about a simple direct action control governor and saw how it works using simple mechanical principles. In this article we will move a step further and know more about a relay governor which uses a servomechanism to achieve more advanced control than the direct action type.
Relay Governor Controls
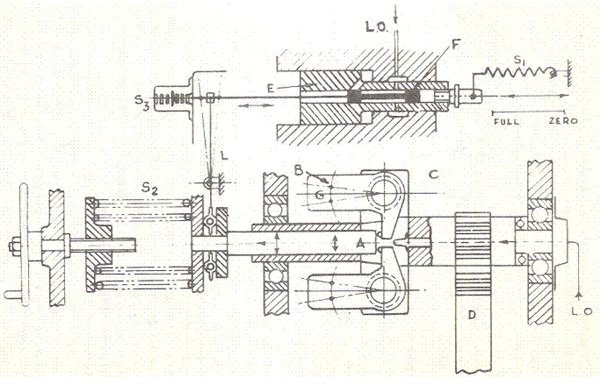
The detailed working of relay governor with servomechanism is shown in the adjoining diagram which is clearly labeled and all parts of shown for the benefit of the reader. You will notice that the basic principle of operation is the same as that of the direct action governor.
You will notice that apart from the controlling force represented by S2 in this diagram, there are two more spring forces namely S1 and S2. The working of this device till the lever L is same as studied about direct action controller but here is where the differences begin.
Under conditions of constant speed, the mechanisms are in overall equilibrium. The spring force S2 is balanced by the centrifugal force from the flyweights. The servomechanism piston is also kept in equilibrium with the help of lubricating oil pressure acting on its underside and the spring force S1 which tends to pull it towards the zero admission position by default.
Let us imagine a situation in which the load in the engine suddenly drops. This would result in a sudden increase in speed. This would mean that the bell crank levers will go more towards their outward position and the controlling spring S2 will be pushed inside. The level L also acts through the linkage and the motion is finally delivered to the pilot valve F inside the servo cylinder.
When the pilot valves moves the lubricating oil pressure is unbalanced and it moves the valves so that a new equilibrium position is reached. This new position is towards reduced admission position of the spring S1. Hence this reduced admission of fuel helps to reduce the speed of the engine . The function of the spring S3 is simply to provide a buffer against excess oscillation due to instantaneous load changes on the engine.
Role in Engine Safety
Apart from speed control which can be even achieved with a simple direct action control, the other advantage of using this type of arrangement is to safeguard engine damage against loss of lubricating oil pressure.
We know that the lubricating oil is very necessary for a marine engine , rather any type of engine. Hence there should be two safeguards – firstly the engine should not start in the absence of proper lubricating oil pressure build up, and secondly the engine should automatically shut down if the lubricating oil pressure drops below a certain value. If this does not happen, there are chances of severe engine damage.
In this case suppose if the lubricating oil pressure is not present due to any reason, the pilot valve would have nothing to stop it from being pulled towards the zero admission position. So the engine would not start or even if it is in the running position, the fuel would get cut-off completely in such a situation thus saving the engine.
Droop
I would like to mention about a term known as droop at this stage. Basically droop is nothing but the difference in the engine RPM from no load to full load position in a given equilibrium position. So it means that if the droop is large the governor is stable but less sensitive. On the other hand if the governor is made too sensitive, it could have the tendency of hunting.