What is Kinematics? Kinematics - Design of Mechanisms: Introduction to kinematics
Kinematics
The study of Kinematics of mechanisms and the machines, which are composed of one or more mechanisms, involves analysis of geometry of motion. Different components of any mechanism move relative to the each other following certain constraints to produce the desired motion. Kinematic analysis is of prime importance in design of mechanisms and machines.
For kinematic design of a mechanism analysis is done for positions of points on a solid body and the time derivatives of the position. The first derivative of position with respect to time is velocity, the second derivative is acceleration and further derivatives can be analyzed according to the design requirements. Similarly for angular position there is angular velocity and angular acceleration.
Mechanisms
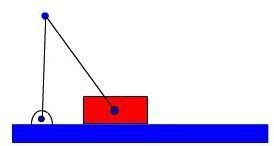
The simplest example for a mechanism will be a liver hinged at a wedge. It transfers input motion at one end to the output motion on the other end. A scissors is a combination of two livers; the mechanical work from one end can be transformed to cutting motion on the output end. The two livers in scissors are connected together by a joint (revolute joint). A slightly more complex mechanism is a slider crank mechanism.
Thus mechanisms can be defined as assembly of rigid members connected to each other through joints. A mechanism transfers the input motion or work at the input point or point of actuation to one or more output points. Like in case of slider crank mechanism, the input rotational motion of the crank is transferred to the slider as a reciprocating motion.
simple Mechanisms

Kinematic Joints
The members in a mechanism are connected by kinematic joints. A kinematic joint is formed by direct contact between the surfaces of the members forming that joint. The contact between the surfaces of the members can be point contact, line contact or area contact. The joints are classified according to the type of contact and relative motion of the members. The contact stresses developed will also depend on the contact type.
There are two types of joints according to the type of contact:
-
Lower pair joint
-
Higher pair joint
Lower pair joint has area contact between the two mating surfaces of the members forming joint, as in the case for slider, revolute and hinge.
Higher pair joint has the contact between the mating surfaces as point or line contact as in the case for cam pair and cam-follower.
Following sections will discuss basics of analysis and synthesis of mechanisms.
References
Book: Theory of Mechanisms and Machines – Ghosh and Mallik
Book: Kinematics, Dynamics and Design of Machinery – Waldron and Kinzel
This post is part of the series: Kinematics - Design of Mechanisms
Machines as simple as livers, machines such as James Watt’s steam engine and the industrial robots such as PUMA all are composed of mechanisms whether simple, complex or combination of many simple and complex mechanisms. These mechanisms are governed by Kinematics – the study of geometry and motion.
- Kinematics - Design of Mechanisms: Introduction
- Analysis and Synthesis in Machine Design
- Types of Kinematic Joints
- Degrees of Freedom
- Kinematics – Design of Mechanisms: Kinematic Inversion
- Kinematics – Actuation of Machines: Part I – Electrical Actuation
- Kinematics – Actuation of Machines: Part II – Hydraulic Actuation
- Kinematics – Actuation of Machines: Part III – Pneumatic Actuation
- Kinematics - Analysis of Mechanisms: Methods and Techniques
- Kinematics - Synthesis of Mechanisms: Methods and Techniques
- Four Bar Linkages in Machine Design
- Straight Line Mechanisms
- Kinematics - Special Mechanisms: Straight Line Mechanisms - II
- Exact Straight Line Mechanisms